Para los más curiosos
En el nivel avanzado, abordamos las complejidades matemáticas que subyacen a nuestras predicciones de alineación. Aquí introducimos un sistema de coordenadas tridimensionales conocido como ECEF (Earth-Centered, Earth-Fixed), que es esencial para nuestros cálculos.
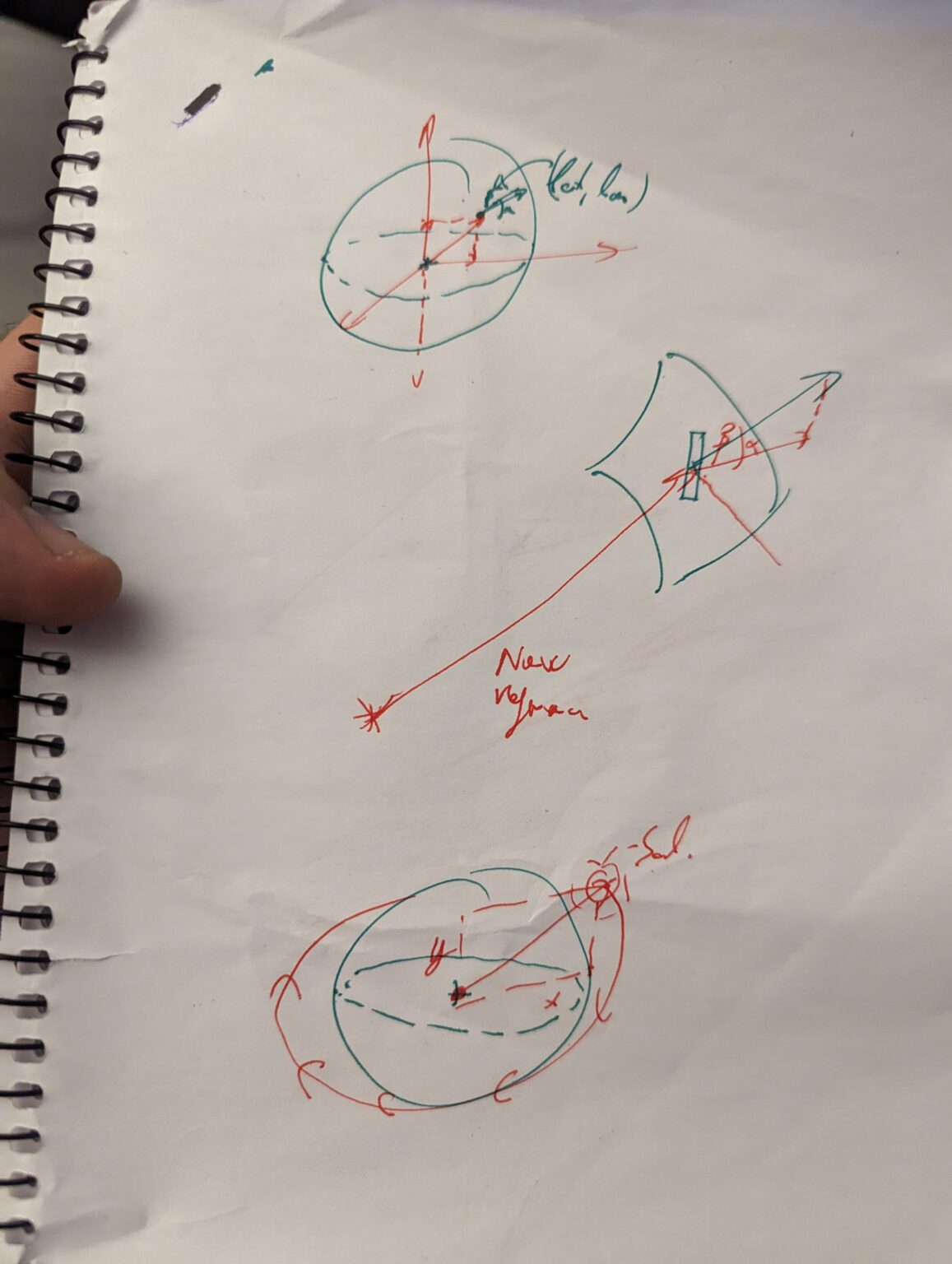
El sistema de coordenadas ECEF es un sistema de coordenadas cartesianas tridimensionales que tiene su origen en el centro de masa de la Tierra. La 'Z' se alinea con el eje de rotación de la Tierra (desde el Polo Sur hasta el Polo Norte), 'X' está alineada con el Meridiano de Greenwich y 'Y' forma un sistema de mano derecha con X y Z.
Este sistema nos permite representar posiciones en la Tierra en un espacio tridimensional, lo que es útil para cálculos que involucran posiciones y orientaciones en todo el mundo. En nuestro caso, lo usamos para calcular el momento exacto en que el sol se alinea con la Calle Mayor.
Primero, debemos convertir nuestros ángulos de azimut y zenital en coordenadas ECEF. Esto implica la transformación de las coordenadas esféricas (radiales, azimut, zenitales) a las coordenadas cartesianas (x, y, z). La transformación utiliza las siguientes ecuaciones:
X = R * sen(Zenit) * cos(Azimut) Y = R * sen(Zenit) * sen(Azimut) Z = R * cos(Zenit)
Donde R es la distancia desde el observador al sol, que podemos considerar constante ya que la distancia entre la Tierra y el Sol varía muy poco durante el día.
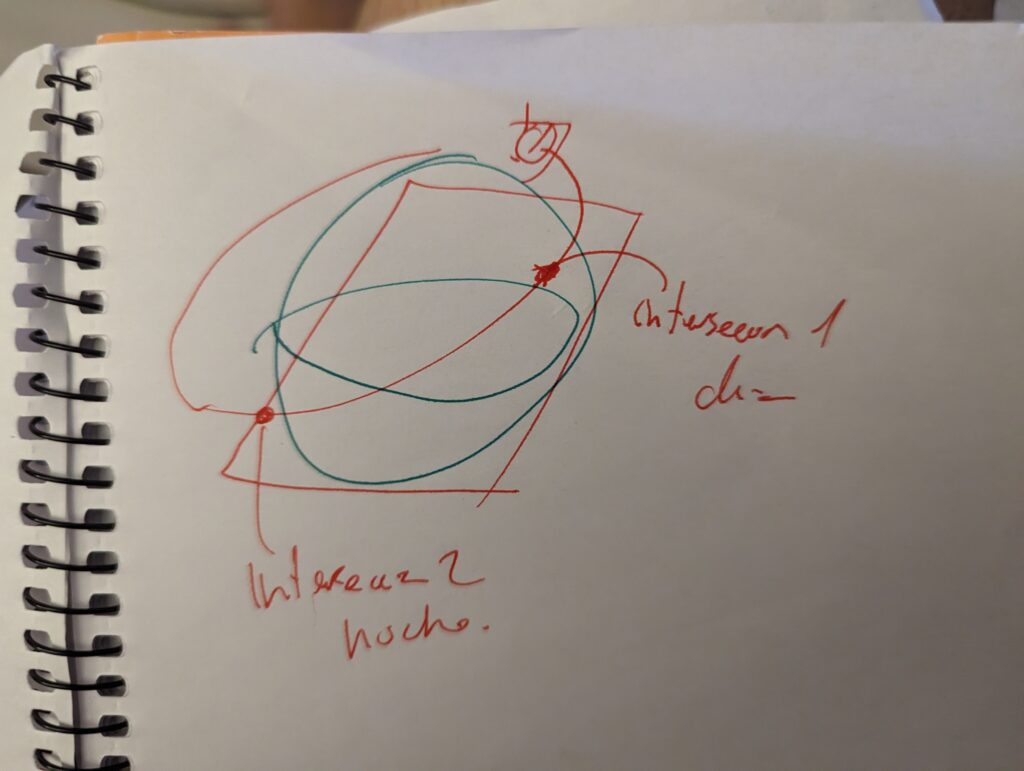
Una vez que tenemos las coordenadas ECEF, podemos describir la posición del sol y la orientación de la Calle Mayor en el mismo sistema de coordenadas. Esto nos permite determinar el momento exacto en que el sol se alinea con la Calle Mayor calculando la intersección de la línea que representa la trayectoria del sol y el plano que representa la calle.
Este es un proceso altamente técnico que requiere una comprensión sólida de las matemáticas y la física. Pero es precisamente esta complejidad lo que hace que los resultados sean tan asombrosos: nos permite predecir un fenómeno celestial a partir de nuestra ubicación específica en la Tierra.
El movimiento del sol en el cielo puede ser descrito mediante un conjunto de ecuaciones conocidas como las ecuaciones del sol. Estas ecuaciones describen la posición aparente del sol (en términos de su ángulo zenital y ángulo de azimut) en un punto específico de la Tierra (definido por su latitud y longitud) en un momento específico del día.
En términos generales, el ángulo de azimut (A) y el ángulo zenital (Z) del sol pueden ser calculados usando las siguientes ecuaciones:
A = atan2(sin(H), cos(H) * sin(φ) - tan(δ) * cos(φ))
Z = acos(sin(φ) * sin(δ) + cos(φ) * cos(δ) * cos(H))
Aquí, φ es la latitud del observador, H es el ángulo horario del sol (que es una medida del tiempo, con 0 grados en el mediodía solar y aumentando en 15 grados por hora), y δ es la declinación solar, que es la altura del sol sobre el ecuador celestial y varía a lo largo del año debido a la inclinación del eje de la Tierra.
Para obtener la declinación del sol y el ángulo horario, se usan otras ecuaciones que toman en cuenta factores como el día del año y la ecuación del tiempo, que es una corrección que se aplica debido a la órbita elíptica de la Tierra alrededor del sol y la inclinación del eje de la Tierra.
Una vez que tenemos el ángulo de azimut y el ángulo zenital del sol, estos pueden ser convertidos en coordenadas ECEF como describimos anteriormente, permitiéndonos predecir la posición exacta del sol en cualquier momento.
Estas ecuaciones, a pesar de su complejidad, nos permiten predecir con precisión la trayectoria del sol en el cielo desde cualquier lugar de la Tierra, y son la clave para capturar las impresionantes fotografías de alineación solar en la Calle Mayor.
La definición del plano que representa la Calle Mayor es crucial para determinar el momento de alineación con el sol. Para simplificar el problema, abordamos esta tarea mediante un enfoque geométrico que utiliza el sistema de coordenadas ECEF.
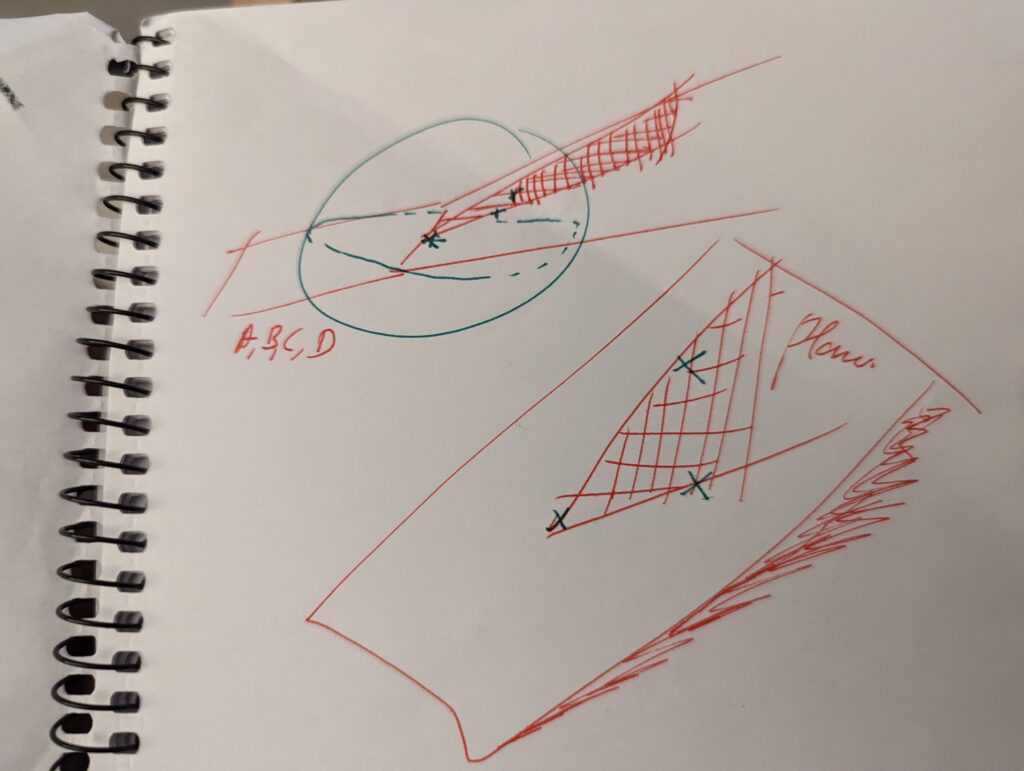
Para definir un plano en un espacio tridimensional, necesitamos tres puntos. En nuestro caso, los dos primeros puntos son obvios: las coordenadas ECEF del inicio y del final de la Calle Mayor. Sin embargo, el tercer punto es un poco menos intuitivo. A fin de evitar complicaciones relacionadas con la curvatura y la forma elíptica de la Tierra, elegimos el tercer punto como el centro de la Tierra. Al hacer esto, garantizamos que nuestro plano será perpendicular a la superficie de la Tierra en los puntos de inicio y final de la calle, lo que es crucial para obtener resultados precisos.
Una vez que tenemos nuestros tres puntos, podemos usarlos para definir la ecuación del plano. En forma general, la ecuación de un plano en coordenadas cartesianas es:
Ax + By + C*z + D = 0
Donde A, B y C son los coeficientes que definen la orientación del plano, y D es una constante. Estos coeficientes pueden ser determinados a partir de los tres puntos que hemos seleccionado.
En resumen, usando este enfoque, podemos definir matemáticamente la Calle Mayor como un plano en el espacio tridimensional. A partir de ahí, todo lo que necesitamos es calcular la intersección de este plano con la línea que representa la trayectoria del sol, lo que nos da el momento exacto de la alineación.
Para calcular los coeficientes A, B y C que definen la orientación del plano, necesitamos convertir las coordenadas de latitud y longitud de los puntos de inicio y final de la Calle Mayor a coordenadas ECEF, tal como explicamos anteriormente. Supongamos que estos puntos son P1(x1, y1, z1) y P2(x2, y2, z2) en coordenadas ECEF. El tercer punto es el centro de la Tierra, que en coordenadas ECEF es simplemente el origen, es decir, P0(0, 0, 0).
Una vez que tenemos estos puntos, podemos calcular un vector que va desde el origen hasta P1, que es simplemente V1 = P1 - P0 = (x1, y1, z1), y un vector que va desde el origen hasta P2, que es V2 = P2 - P0 = (x2, y2, z2). El vector normal al plano es entonces el producto cruz de estos dos vectores, que podemos calcular como:
N = V1 x V2 = (y1z2 - z1y2, z1x2 - x1z2, x1y2 - y1x2)
Este vector normal (N) nos da los coeficientes A, B y C de la ecuación del plano. Es decir, A es la primera componente del vector N, B es la segunda componente, y C es la tercera componente.
Finalmente, para calcular el coeficiente D, debemos sustituir un punto del plano en la ecuación del plano. Como el origen es un punto en nuestro plano (por cómo lo hemos definido), este paso es fácil: simplemente ponemos x = y = z = 0 en la ecuación del plano y resolvemos para D. Dado que la ecuación del plano es Ax + By + C*z + D = 0, y x, y, y z son todos cero, D simplemente será igual a 0.
Por lo tanto, tenemos nuestros coeficientes del plano: A, B, C y D = 0.
Estos coeficientes son fundamentales para nuestros cálculos. Nos permiten representar matemáticamente la Calle Mayor en 3D, que a su vez nos permite calcular el momento exacto de la alineación del sol con la calle.
Resolver simultáneamente las ecuaciones del plano y de la trayectoria del sol implica encontrar los valores que satisfacen ambas ecuaciones al mismo tiempo. En términos matemáticos, estamos buscando el punto de intersección de estas dos 'superficies' en el espacio tridimensional.
La ecuación de la trayectoria del sol se puede expresar como un vector parametrizado en el tiempo 't', es decir, S(t) = (Xs(t), Ys(t), Zs(t)), donde Xs(t), Ys(t) y Zs(t) son las componentes de la posición del sol en función del tiempo.
Por otro lado, la ecuación del plano se puede escribir en la forma general Ax + By + C*z + D = 0, donde (x, y, z) son las coordenadas de cualquier punto en el plano, y A, B, C y D son los coeficientes del plano que calculamos antes.
Para encontrar el valor de 't' en el que el sol se alinea con la Calle Mayor, debemos sustituir S(t) en la ecuación del plano, obteniendo AXs(t) + BYs(t) + C*Zs(t) + D = 0. Esta es ahora una ecuación en 't' que podemos resolver para encontrar el tiempo específico del alineamiento.
El método exacto para resolver esta ecuación depende de la forma específica de las componentes Xs(t), Ys(t) y Zs(t). En la mayoría de los casos, es probable que necesitemos utilizar métodos numéricos, como el método de Newton, para encontrar una solución precisa. Este método, que es ampliamente utilizado en muchos campos de la ciencia y la ingeniería, permite encontrar soluciones a ecuaciones que no se pueden resolver analíticamente.
Una vez que hemos obtenido el valor de 't', simplemente lo convertimos a la hora local para conocer el momento exacto del día en que se producirá la alineación.